Making and Tinkering (M&T)
In this module, my team consisting of fellow CN Yang Scholars from different faculties - Physics, Biology, and Environmental Science - came together to realize a drone with a 360° video camera gimbal. In 2019, drones with full surrounding camera angle capabilities were not common or affordable, but we believe that such drones can be very helpful. With a fully controllable 360° video camera gimbal, drones can augment many manual tasks such as building inspections at a height or through disaster effort. As such, my team decided to make work on this meaningful project, with none of us having much experience or background in drones or cameras. It was therefore challenging to learn from scratch, especially with different backgrounds. However, that differences also allowed for a varied mix of perspectives and ideas, where we tried to employ each of our strengths to complete the project. I focused on the circuitry and electronic components of the drone. At the same time, we shared our findings and learnings, and helped each other whenever possible, allowing all of us to learn new skills and experiences at the same time. As the leader of the team, I am very honoured and glad to have worked with the brilliant and helpful members, where we struggled, learned and won the outstanding award together.
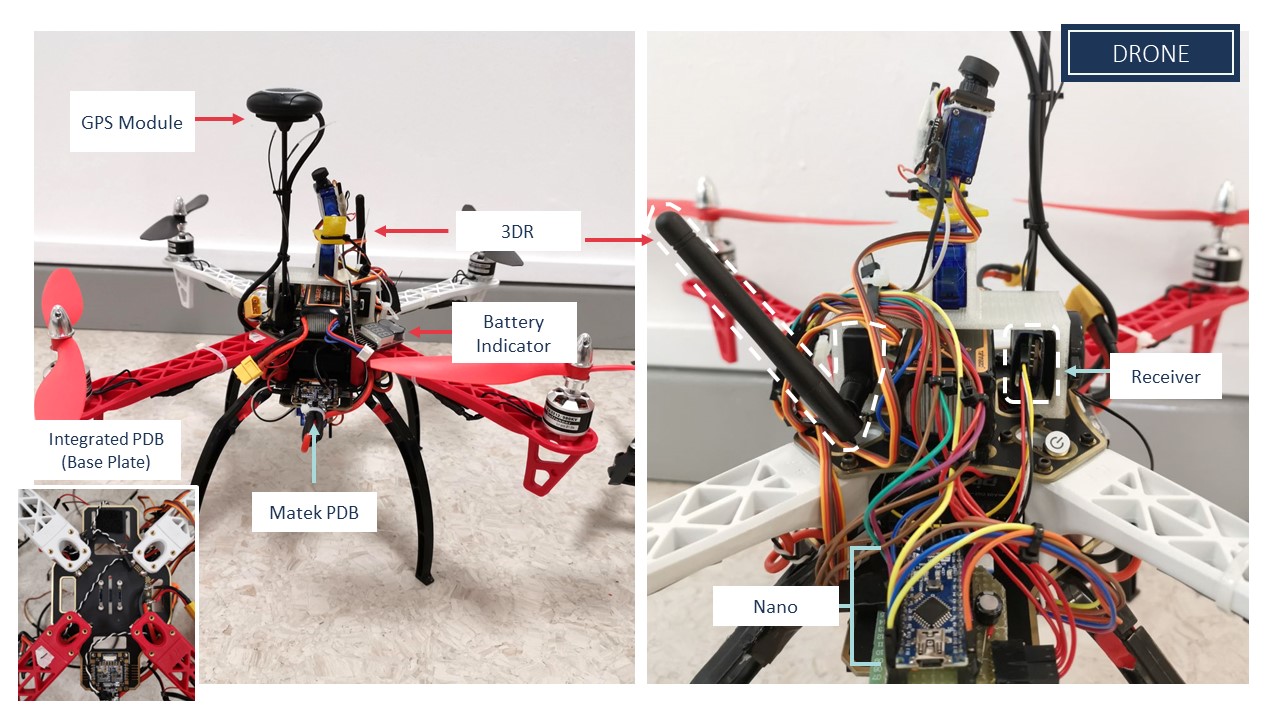
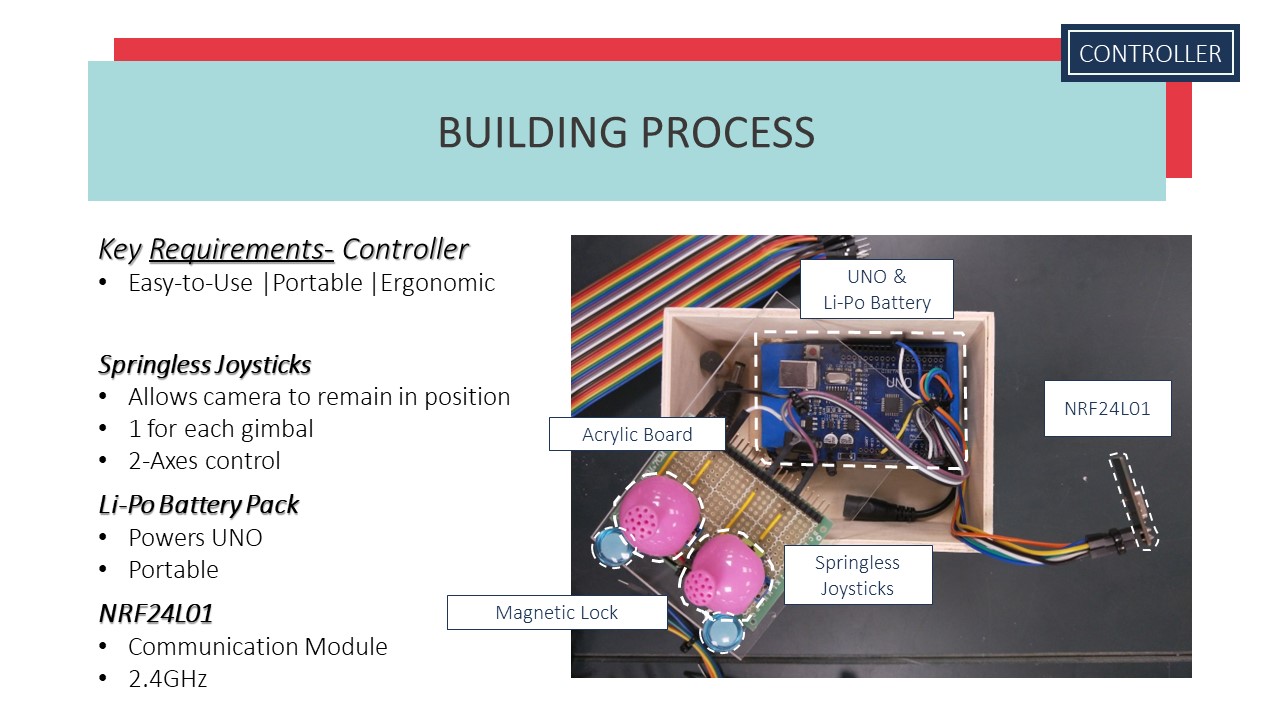
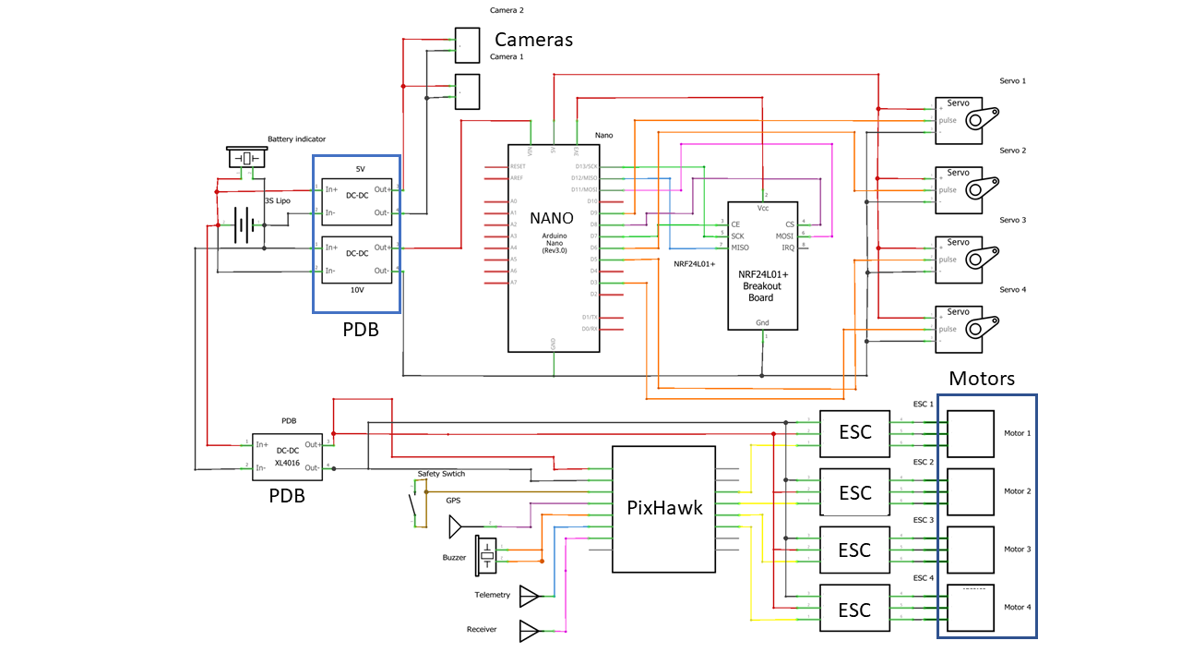
Initially choosing a 250 drone frame, we found it highly difficult to balance the payload especially with additional gimbal and circuitry we wished to put. Hence, we went on with the F450 quadcopter frame instead, and implemented the gimbal using a separate control system (controller and receiver) using Arduino nano and with RF module. The gimbal was designed using Fusion360 and 3D printed after multiple optimization iterations.